







Vasaku käe reegel, parema käe reegel, parema käe kruvi reegel.Vasaku käe reegel, see on mootori pöörlemisjõu analüüsi aluseks.Lihtsamalt öeldes on jõud mõjutatud magnetvälja voolu juhtivale juhile.
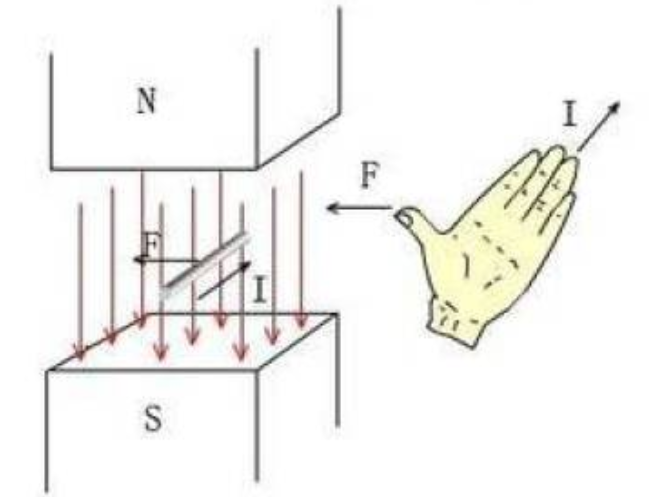
Laske magnetvälja joonel läbida peopesa esiosa, sõrmede suund on voolu suund ja pöidla suund on magnetjõu suund.Jõu tõmbejõud lõikab elektromotoorjõu tekitamiseks magnetvälja jooni.
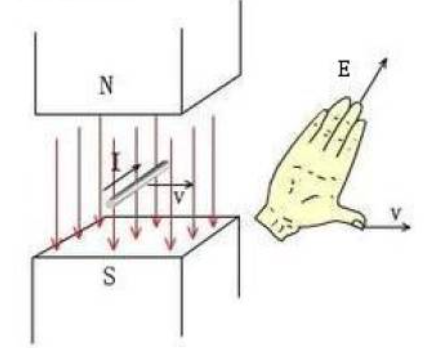
Laske magnetvälja joonel läbida peopesa, pöidla suund on liikumissuund ja sõrme suund on genereeritud elektromotoorjõu suund.Miks rääkida indutseeritud elektromotoorjõust?Ma ei tea, kas teil on sarnaseid kogemusi.Kui ühendate mootori kolmefaasilised juhtmed ja keerate mootorit käsitsi, näete, et takistus on väga suur.Seda seetõttu, et induktsioon toimub mootori pöörlemise ajal.Elektromotoorjõud tekitab voolu ja magnetväljas läbi juhi voolav vool tekitab pöörlemissuunale vastupidise jõu ja kõik tunnevad, et pöörlemisel on palju takistust.
Kolmefaasilised juhtmed on eraldatud ja mootorit saab kergesti pöörata
Kolmefaasilised liinid on kombineeritud ja mootori takistus on väga suur.Parema käe kruvireegli järgi hoia pingestatud solenoidi parema käega nii, et neli sõrme painduvad vooluga samas suunas, siis pöidlaga näidatud ots on pingestatud solenoidi N poolus.
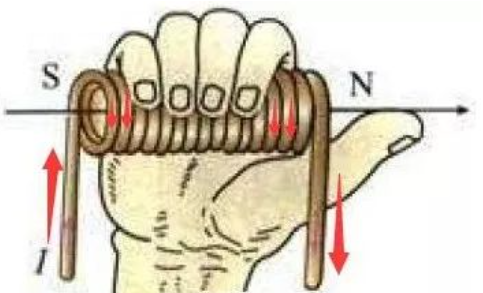
See reegel on aluseks pingestatud mähise polaarsuse hindamisel ja punase noole suund on voolu suund.Pärast kolme reegli lugemist vaatame mootori pöörlemise põhiprintsiipe.Esimene osa: Alalisvoolumootori mudel Leiame gümnaasiumi füüsikas uuritud alalisvoolumootori mudeli ja teostame lihtsa analüüsi läbi magnetahela analüüsi meetodi.
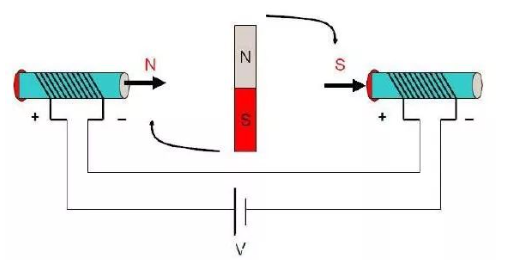
Olek 1 Kui mähistele suunatakse vool mõlemas otsas, tekib parempoolse kruvi reegli kohaselt rakendatud magnetilise induktsiooni intensiivsus B (nagu on näidatud paksu noolega) ja keskel asuv rootor proovib selle sisemise magnetilise induktsiooni joone suund nii kaugele kui võimalik.Välise magnetvälja joone suund on ühtlane, moodustades lühima suletud magnetvälja ahela, nii et sisemine rootor pöörleb päripäeva.Kui rootori magnetvälja suund on risti välise magnetvälja suunaga, on rootori pöörlemismoment suurim.Pange tähele, et "hetk" on väidetavalt suurim, mitte "jõud".On tõsi, et kui rootori magnetväli on välise magnetväljaga samas suunas, on rootorile mõjuv magnetjõud suurim, kuid sel ajal on rootor horisontaalasendis ja jõuõlg on 0 ja muidugi see ei pöörle.Lisades, moment on jõu ja jõu õla korrutis.Kui üks neist on null, on korrutis null.Kui rootor pöördub horisontaalasendisse, kuigi pöörlemismoment seda enam ei mõjuta, jätkab see inertsi tõttu päripäeva pöörlemist.Sel ajal, kui kahe solenoidi voolusuunda muudetakse, nagu on näidatud alloleval joonisel, jätkab rootor pöörlemist.keerake päripäeva edasi,
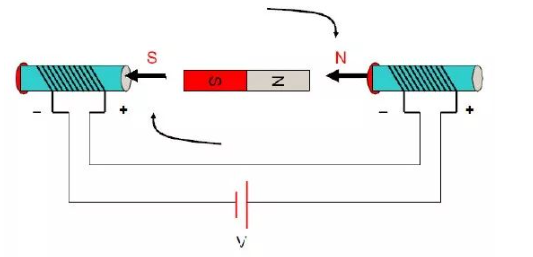
Olekus 2 muudetakse kahe solenoidi voolusuunda pidevalt ja sisemine rootor jätkab pöörlemist.Seda voolu suuna muutmise toimingut nimetatakse kommutatsiooniks.Vahemärkus: kommuteerimise aeg on seotud ainult rootori asendiga, mitte otseselt ühegi teise suurusega.Osa 2: Kolmefaasiline kahepooluseline sisemise rootori mootor Üldiselt on staatori kolmefaasilistel mähistel tähtühendusrežiim ja kolmnurkühendusrežiim ning kõige tavalisem on "kolmefaasilise tähtühenduse kaks-kaks juhtivusrežiim". kasutatud, mida siin kasutatakse.Seda mudelit kasutatakse lihtsaks analüüsiks.
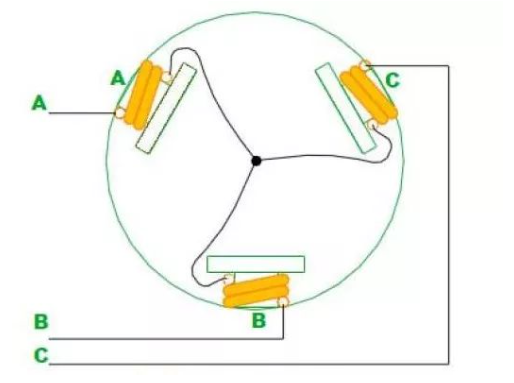
Ülaltoodud joonis näitab, kuidas staatori mähised on ühendatud (rootorit pole kujutatud hüpoteetilise kahepooluselise magnetina) ja kolm mähist on ühendatud Y-kujuliselt läbi keskse ühenduspunkti.Kogu mootor viib kolme juhtmeni A, B, C. Kui need on kahekaupa pingestatud, on 6 juhtumit, nimelt AB, AC, BC, BA, CA, CB.Pange tähele, et see on korras.
Nüüd vaatan esimest etappi: AB-faas on pingestatud
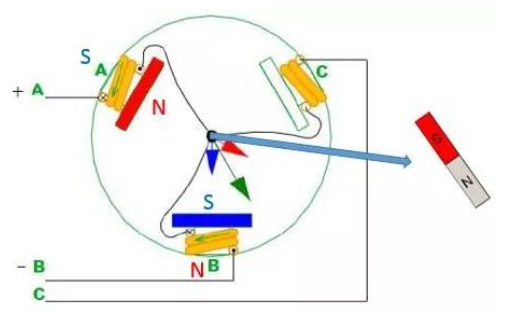
Kui AB-faas on pingestatud, näidatakse A-pooluse pooli genereeritud magnetvälja joone suunda punase noolega ja B-pooluse poolt genereeritud magnetvälja joone suunda näitab sinine nool, seejärel suund. resultantjõu suurust näidatakse rohelise noolega, siis eeldades, et on olemas kahepooluseline magnet, langeb N-pooluse suund kokku rohelise noolega näidatud suunaga vastavalt "keskel asuv rootor püüab hoida selle sisemiste magnetvälja joonte suund on kooskõlas väliste magnetvälja joonte suunaga”.Mis puutub C-sse, siis temaga pole esialgu midagi pistmist.
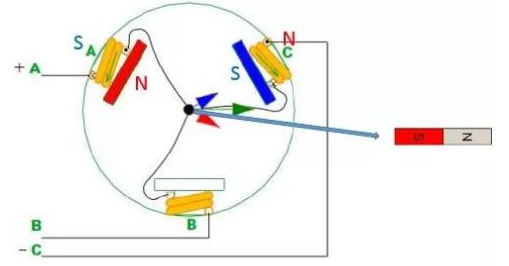
2. etapp: vahelduvvoolufaas pingestatud
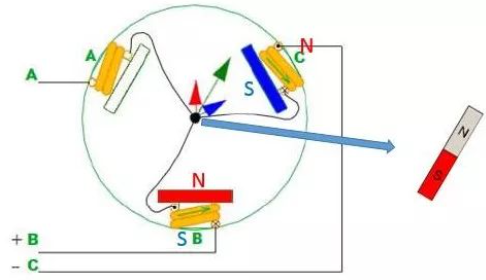
Kolmas etapp: BC faasi elektrifitseerimine
Kolmas etapp: BA-faas on pingestatud
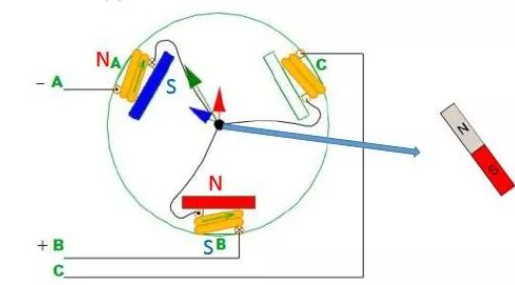
Järgmine on vahepealse magneti (rootori) olekuskeem: iga protsessi rootor pöörleb 60 kraadi

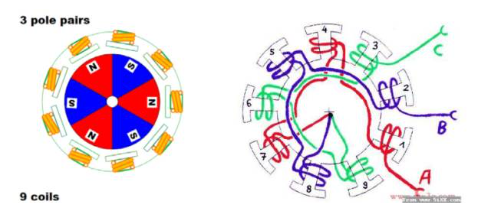
Täielik pöörlemine viiakse läbi kuues protsessis, millest kuus kommutatsiooni tehakse.Kolmas osa: kolmefaasiline mitme mähisega mitmepooluseline siserootori mootor Vaatame keerulisemat punkti.Joonisel (a) on kolmefaasiline üheksa mähisega kuuepooluseline (kolmefaasiline, üheksa mähisega, kuuepooluseline) mootor.Vastaspooluse) sisemise rootori mootor, selle mähisühendus on näidatud joonisel (b).Jooniselt (b) on näha, et kolmefaasilised mähised on omavahel ühendatud ka vahepunktis, mis on ühtlasi ka tähtühendus.Üldiselt on mootori mähiste arv vastuolus püsimagneti pooluste arvuga (näiteks 6 mähise ja 6 pooluse asemel kasutatakse 9 mähist ja 6 poolust), et vältida staatori ja staatori hammaste tekkimist. rootori magnetid ligi tõmbama ja joonduma.
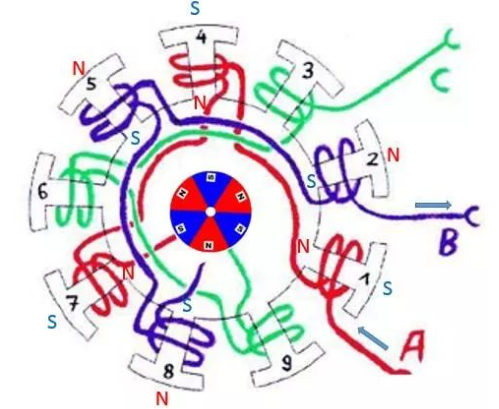
Selle liikumise põhimõte on järgmine: rootori N-poolus ja pingestatud mähise S-poolus kalduvad joonduma ning rootori S-poolus ja pingestatud mähise N-poolus kalduvad joonduma.See tähendab, et S ja N tõmbavad teineteist.Pange tähele, et see erineb eelmisest analüüsimeetodist.Noh, aitame teil seda uuesti analüüsida.Esimene etapp: AB-faas on elektrifitseeritud
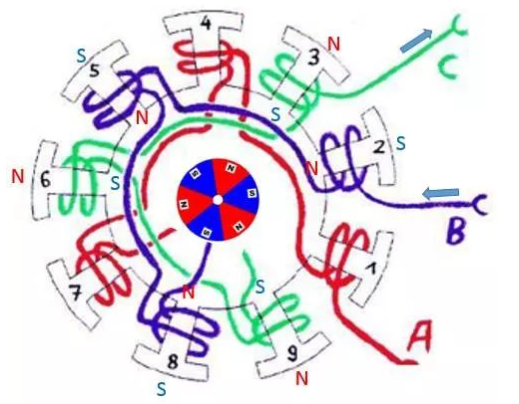
2. etapp: vahelduvvoolufaas pingestatud

Kolmas etapp: BC faasi elektrifitseerimine
Postitusaeg: 21.10.2022